Galil 軸控卡 之 指令範例
- 實例一 梯型速度曲線位移
X軸由速度等於0,在加速度100,000單位/秒2下,加速至定速20,000單位/秒2,然後再以減速100,000單位/秒2減速至0,總共位移10,000單位指 令 說 明 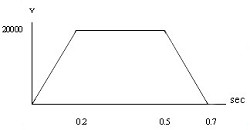
PR10000 位移 (PR:Relative Position) SP20000 速度 (SP:Speed) DC100000 減速度 (DC:Deceleration) AC100000 加速度 (AC:Acceleration) BGX 開始運動 (BG:Begin)
- 實例二 多軸運動
4軸獨立運動、分別設定位移、速度及加減速指 令 說 明 PR500,1000,600,-400 X,Y,Z,W之位移 SP10000,12000,20000,10000 X,Y,Z,W定速 AC100000,10000,100000,100000 X,Y,Z,W加速度 DC80000,40000,30000,50000 X,Y,Z,W減速度 BGXZ 開始X,Z軸之運動 BGYW 開始Y,W軸之運動
- 實例三 速度控制
驅動X,Y軸馬達到達定速指 令 說 明 JG10000,-20000 設定速度及方向(JG:jog) AC100000,40000 設定加速度 DC50000,50000 設定減速度 BGXY 開始運動 幾分鐘後 JG-40000 新的X軸速度及方向 TVX 查詢X軸速度(Tell Velocity) 然後 JG,20000 新的Y軸速度及方向 TVY 查詢Y軸速度及方向 停止運動 ST 停止運動(STOP)
- 實例四 圓弧補間
定義X,Y軸連續向量運動的啟始點位置為原點位置指 令 說 明 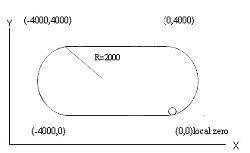
VMXY 定義XY運動平面 VP - 4000,0 定義直線 CR2000,270,-180 定義弧 VP0,4000 定義直線 CR2000,90,-180 定義弧 VS1000 向量速度 VA50000 向量加速度 VD50000 向量減速度 VE 結束定義 BGS 開始執行